Alat Bantu Mobilitas Penyandang Tunanetra Berbasis Atmega8535
LAPORAN
LABORATORIUM
MIKROKONTROLLER 1
ALAT BANTU MOBILITAS PENYANDANG TUNANETRA BERBASIS ATMEGA8535
Dosen Pengampu:
Dr.
Samuel Beta K. K., Ing.Tech., M.T.
Disusun Oleh:
KELOMPOK 3
Amara
Novia Dewi RE-2B (4.34.22.1.03)
Luthfan Daffa Maulana RE-2B (4.34.22.1.12)
Luthfan Daffa Maulana RE-2B (4.34.22.1.12)
Nafisa
Nasya Az Zahra RE-2B (4.34.22.1.17)
Wildan
Surya Silatama RE-2B (4.34.22.1.24)
PROGRAM STUDI TEKNOLOGI REKAYASA ELEKTRONIKA
JURUSAN TEKNIK ELEKTRO
POLITEKNIK NEGERI SEMARANG
2023
BAB 1
PENDAHULUAN
PENDAHULUAN
1.1. Latar Belakang
Kurangnya kemampuan persepsi yang dialami oleh orang tunanetra menyebabkan tunanetra kesulitan untuk mengetahui objek yang berada di sekelilingnya. Untuk membantu mengatasi permasalahan tersebut, maka dirancang sebuah alat bantu mobilitas tunanetra menggunakan sensor ultrasonik. Sensor ultrasonik bekerja untuk menghitung waktu pengiriman dan penerimaan gelombang ultrasonik. Nilai selisih tersebut akan diolah menggunakan mikrokontroler sehingga menghasilkan keluaran dalam satuan jarak. Alat ini mampu mendeteksi benda atau halangan yang dapat memantulkan gelombang. Sensor ultrasonik sebagai input kemudian hasilnya atau outputnya berupa bunyi buzzer yang bisa di dengarkan oleh penyandang tunanetra, sehingga para penyandang tunanetra dapat lebih mudah dalam berjalan.
1.2. Rumusan Masalah
Berdasarkan uraian di atas, beberapa rumusan masalah yang harus diperhatikan, yaitu:
1. Bagaimana cara merancang tongkat bantu bagi tunanetra?
2. Bagaimana cara memberi peringatan bagi penyandang tunanetra jika terdapat objek di depannya?
1.3. Solusi
Berdasarkan permasalahan di atas, solusi yang diperoleh, yaitu merancang sebuah tongkat bantu bagi penyandang tunanetra. Tongkat dirancang supaya dapat memberi peringatan kepada penyandang tunanetra jika terdapat objek di depannya. Sensor ultrasonik mendeteksi jarak tongkat dengan objek di depannya. Setelah itu, mikrokontroller Atmega8535 akan memproses input dari sensor ultrasonik sehingga menghasilkan keluaran berupa buzzer yang berbunyi jika jarak objek dengan tongkat bantu penyandang tunanetra sudah dekat. Adanya alat bantu bagi penyandang tunanetra ini dapat membantu mereka dalam menjalankan kegiatan sehari-hari, terutama dalam berjalan.
BAB 2
LANDASAN TEORI
2.1. Mikrokontroller Atmega8535
Mikrokontroler merupakan keseluruhan sistem komputer yang dikemas menjadi sebuah chip
di mana di dalamnya sudah terdapat mikroprosesor, I/O, memori bahkan ADC. Mikrokontroller AVR (Alf and Vegard’s Risc processor) memiliki arsitektur 8 bit, di mana
semua instruksi dikemas dalam kode 16-bit dan sebagian besar instruksi dieksekusi dalam 1 siklus
clock atau dikenal dengan teknologi RISC (Reduced Instruction Set Computing). Secara umum, AVR
dapat dikelompokan ke dalam 4 kelas, yaitu keluarga AT90Sxx, keluarga ATMega dan AT86RFxx.
Pada dasarnya, yang membedakan masing-masing adalah kapasitas memori, peripheral, dan fungsinya, sedangkan dari segi arsitektur dan instruksi yang digunakan, mereka bisa dikatakan
hampir sama

Gambar 2.1 Pin Atmega8535
- VCC Input sumber tegangan (+)
- GND Ground (-)
- Port A (PA7 … PA0) berfungsi sebagai input analog dari ADC (Analog to Digital Converter). Port ini juga berfungsi sebagai port I/O dua arah jika ADC tidak digunakan.
- Port B (PB7 … PB0) berfungsi sebagai port I/O dua arah. Port PB5, PB6 dan PB7 juga berfungsi sebagai MOSI, MISO dan SCK yang dipergunakan pada proses downloading.
- Port C (PC7 … PC0) berfungsi sebagai port I/O dua arah.
- Port D (PD7 … PD0) Berfungsi sebagai port I/O dua arah. Port PD0 dan PD1 juga berfungsi sebagai RXD dan TXD, yang dipergunakan untuk komunikasi serial.
- RESET input reset.
- XTAL1 input ke amplifier inverting osilator dan input ke sirkuit clock internal.
- XTAL2 output dari amplifier inverting osilator.
- AVCC input tegangan untuk Port A dan ADC.
- AREF tegangan referensi untuk ADC.
Arsitektur Atmega8535

Gambar 2.2 Arsitektur Atmega8535
- Saluran I/O sebanyak 32 buah, yaitu Port A,Port B,Port C dan Port D.
- ADC 8 channel 10 bit.
- Tiga buah Timer/Counter dengan kemampuan pembanding.
- CPU yang terdiri atas 32 buah register.
- Watchdog timer dengan osilator internal.
- SRAM sebesar 512 byte.
- Memori Flash sebesar 8 KB dengan kemampuan Read While Write.
- Interrupt internal dan eksternal.
- Port antarmuka SPI (Serial Peripheral Interface).
- EEPROM sebesar 512 byte yang dapat diprogram saat operasi.
- Antarmuka komparator analog.
- Port USART untuk komunikasi serial.
2.2. Sensor Ultrasonik HC-SR04
HC-SR04 adalah sensor non-kontak pengukur jarak yang menggunakan ultrasonik. Sensor
ini hanya memerlukan 2 pin I/O untuk berkomunikasi dengan mikrokontroler, yaitu
TRIGGER dan ECHO. Untuk mengaktifkannya, mikrokontroler mengirimkan pulsa
positif melalui pin TRIGGER minimal 10 us, selanjutnya sensor akan akan mengirimkan
8 sinyal berfrekuensi 40kHz dan mendeteksi adakah sinyal yang kembali ke sensor karena
dipantulkan oleh suatu objek. Jika terdapat sinyal yang kembali ke sensor maka akan
terbaca oleh receiver dari sensor. Rentang waktu dari sinyal yang dikirim hingga diterima
akan berbanding lurus dengan jarak dari objek yang memantulkan sinyal tersebut.

Gambar 2.3 Sensor Ultrasonik HC-SR04
Fungsi Pin-pin HC-SR04:
- VCC: 5V
- Trig: Trigger/Penyulut. Pin ini yang digunakan untuk membangkitkan sinyal ultrasonik.
- Echo: Receive/Indikator. Pin ini yang digunakan untuk mendeteksi sinyal pantulan ultrasonik.
- GND: Ground
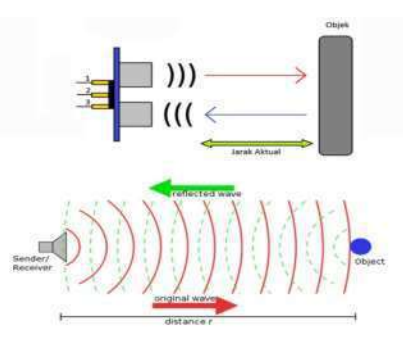
Secara detail, cara kerja sensor ultrasonik, yaitu sinyal dipancarkan oleh pemancar ultrasonik dengan frekuensi tertentu dan dengan
durasi waktu tertentu. Sinyal tersebut berfrekuensi diatas 20kHz. Untuk mengukur jarak
benda (sensor jarak), frekuensi yang umum digunakan adalah 40kHz. Sinyal yang dipancarkan akan merambat sebagai gelombang bunyi dengan kecepatan
sekitar 340 m/s. Ketika menumbuk suatu benda, maka sinyal tersebut akan dipantulkan
oleh benda tersebut. Setelah gelombang pantulan sampai di alat penerima, maka sinyal tersebut akan
diproses untuk menghitung jarak benda tersebut.
Jarak benda dihitung berdasarkan
rumus:
Dimana:
S = Jarak antara sensor dengan objek (m)
t = Waktu tempuh gelombang ultrasonik dari transmitter ke receiver (s)
Spesifikasi Sensor HC-SR04:
- Power Supply : +5V DC
- Arus daya : 15 mA
- Sudut efektif : <15°
- Pembacaan jarak : 2 cm – 400 cm
- Pengukuran sudut : 30°
2.3. Buzzer
Buzzer adalah sebuah komponen elektronika yang berfungsi untuk mengubah getaran listrik menjadi getaran suara. Pada dasarnya prinsip kerja buzzer hampir sama dengan loud speaker, jadi buzzer juga terdiri dari kumparan yang terpasang pada diafragma dan kemudian kumparan tersebut dialiri arus sehingga menjadi elektromagnet, kumparan tadi akan tertarik ke dalam atau keluar, tergantung dari arah arus dan polaritas magnetnya, karena kumparan dipasang pada diafragma maka setiap gerakan kumparan akan menggerakkan diafragma secara bolak-balik sehingga membuat udara bergetar yang akan menghasilkan suara. Buzzer biasa digunakan sebagai indikator bahwa proses telah selesai atau terjadi suatu kesalahan pada sebuah alat (alarm).

Gambar 2.5 Buzzer
BAB 3
PEMBAHASAN
3.1. Perancangan Sistem
Berikut beberapa perancangan sistem yang digunakan dalam mendukung
proses pembuatan alat bantu mobilitas penyandang tunanetra berbasis Atmega8535
3.1.1. Alat dan Komponen
Alat dan komponen yang kami gunakan dalam merancang alat ini, adalah:
- Mikrokontroller Atmega8535
- Buzzer
- Sensor Ultrasonik HC-SR04
- Power Bank
- Jumper
3.1.2. Diagram Balok Alat Bantu Tunanetra

Gambar 3.1 Diagram Balok
Input yang digunakan pada alat bantu tunanetra adalah sensor ultrasonik HC-SR04 dengan mikrokontroller Atmega8535 dan output berupa alarm yang berbunyi, menandakan bahwa jarak objek dengan tongkat bantu tunanetra sudah dekat.
3.1.3. Flowchart Alat Bantu Tunanetra
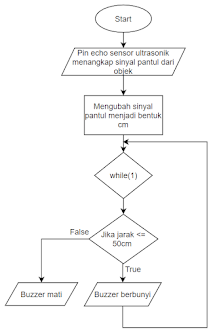
Gambar 3.2 Diagram Alir
Sensor ultrasonik akan menangkap gelombang pantul dari objek kemudian mengubah dalam bentuk jarak. Mikrokontroller Atmega8535 akan memproses input yang diperoleh dari sesnor ultrasonik. Jika jarak yang dibaca oleh sensor <= 50cm, maka buzzer akan berbunyi. Buzzer akan berbunyi semakin cepat jika jarak tongkat bantu tunannetra dengan objek semakin dekat.
3.1.4. Rangkaian Proteus
Berikut merupakan keseluruhan rangkaian alat bantu mobilitas penyandang tunanetra berbasis Atmega8535.

Gambar 3.3 Rangkaian Alat Bantu Tunanetra melalui Software Proteus
3.2. Program
Berikut merupakan program alat bantu tunanetra mulai dari inisialisasi port, pembacaan sensor ultrasonik, hingga menghasilkan keluaran buzzer.
/* =================================================================================
Pemrogram : Kelompok RE-2B/3
1. 03-Amara Novia Dewi NIM:4.34.22.1.03
2. 10-Luthfan Daffa Maulana NIM:4.34.22.1.12
3. 15-Nafisa Nasya Az Zahra NIM:4.34.22.1.17
4. 22-Wildan Surya Silatama NIM:4.34.22.1.22
====================================================================================
Komponen:
- Sensor Ultrasonik
- Buzzer
==================================================================================*/
//=== Pustaka ===
#include <mega16.h>
#include <delay.h>
#include <stdlib.h>
//=== Deklarasi variabel ===
int
count;
unsigned char
jarak,
baca_jarak,
sensor();
//=== Pengesetan Awal ===
unsigned char sensor(){
count = 0;
PORTB.0 = 0;
delay_us(2);
PORTB.0 = 1;
delay_us(10);
PORTB.0 = 0;
while (PINB.1 == 0) {}
while (PINB.1 == 1){
count++;
}
jarak = count * 0.034 / 2;
return jarak;
}
void main(void){
DDRD.0 = 1; //buzzer sebagai output
DDRB.0 = 1; //pin trigger sebagai output
DDRB.1 = 0; //pin echo sebagai input
//=== Program utama ===
while(1) {
baca_jarak = sensor();
if(jarak < 20) {
PORTD.0 = 1;
delay_ms(50);
PORTD.0 = 0;
delay_ms(10);
}
else {
PORTD.0 = 0;
}
}//while
}//main
BAB 4
PENUTUP
4.1. Kesimpulan
Setelah merancang alat bantu bagi tunanetra dan melukan pengujian, dapat disimpulkan bahwa:
- Pin echo pada sensor ultrasonik menangkap gelombang pantul dari objek yang kemudian diproses oleh Atmega8535 untuk diubah dalam bentuk jarak.
- Perancangan alat bantu mobilitas penyandang tunanetra berbasis Atmega8435 dapat memudahkan para penyandang tunanetra dalam melukan kegiatan sehari-hari, terutama dalam berjalan.


Comments
Post a Comment